


Foundations of Deep RL 第一讲:马尔可夫决策过程和精确求解方法。
Genesis分析
对genesis源码的一些理解和分析。包括底层Taichi的简要介绍和genesis刚体仿真的实现,以及和mujoco的一些对比。
Scene Recognition with Bag of Words
Graduate course computer vision homework 3: Scene Recognition with Bag of Words.

Panorama Stitching
Graduate course computer vision homework 2: Panorama Stitching.
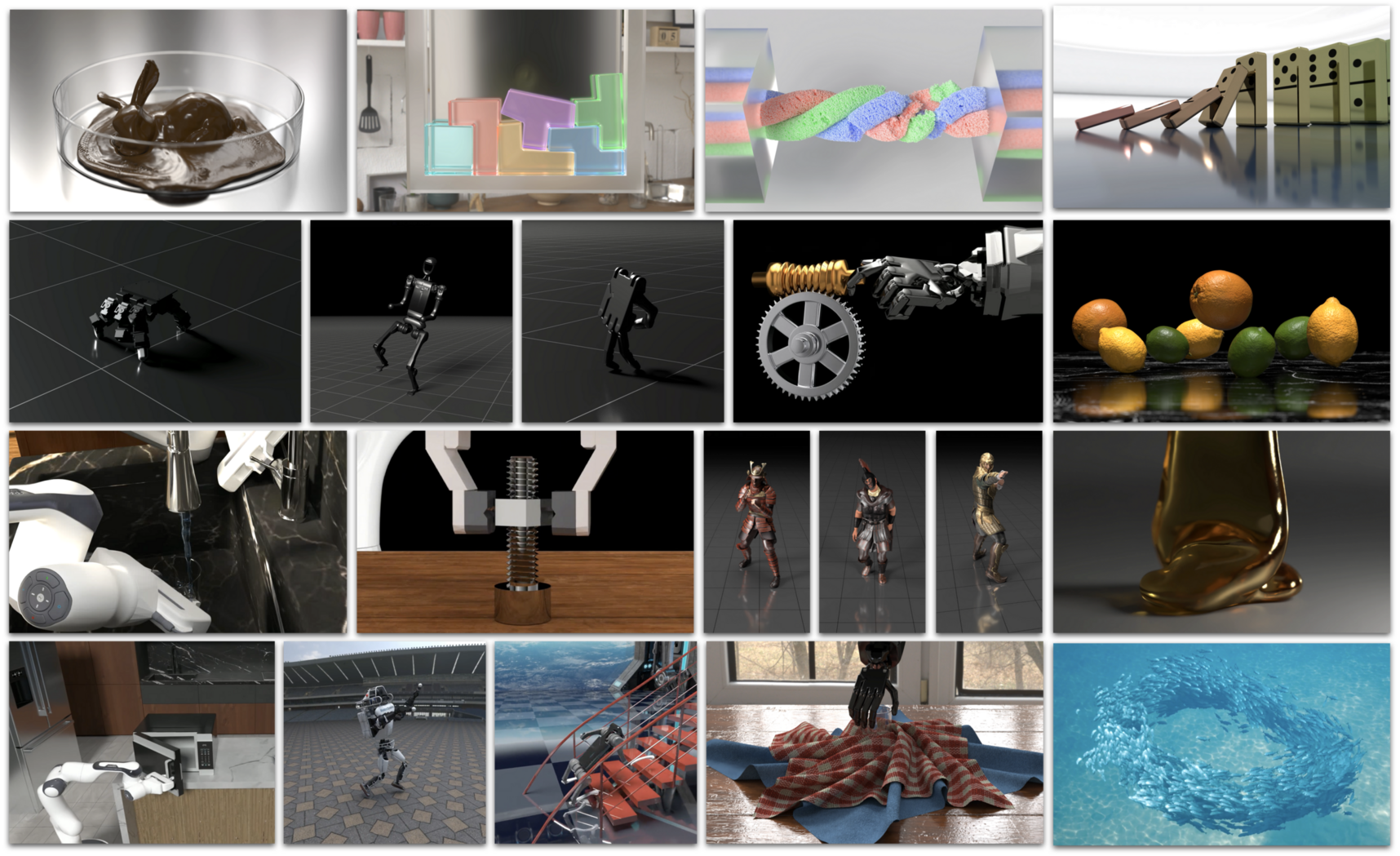
Genesis简要介绍与样例展示
Introduction Genesis 是一个物理平台,专为通用机器人/嵌入式人工智能/物理人工智能应用而设计。它同时是多种事物: 从头开始重建的通用物理引擎,能够模拟各种材料和物理现象。 一个轻量级、超快速、Pythonic 且用户友好的机器人仿真平台。 强大且快速的逼真渲染系统。 一种生成数据引擎,可将用户提示的自然语言描述转换为各种数据形式。 Examples ...将现有场景生成网格导入mujoco的简要pipeline
将现有场景物体导入Mujoco的一个简单可行方法:通过COLMAP对图像或视频进行处理,然后利用基于NeRF的方法如nerfacto计算神经辐射场,并导出mesh,最后利用CoACD工具对mesh进行凸分解以导入mujoco,并保持碰撞的凸性。
Photometric Stereo
Graduate course computer vision homework 1: Photometric Stereo.
主流三维重建方法对比
本文对比了几种主流三维重建方法的特点及应用。并记录其中某些方法部署过程中遇到的问题和解决方案。
NeRF Studio简要教程
本文分享了在安装和使用NeRF Studio过程中遇到的一些常见问题和解决方法,包括Python版本兼容性、加速库安装以及配置环境变量等方面的经验教训。最后使用nerfacto和splatfacto训练,对比了两种方法的效果
Mathjax与渲染引擎marked冲突解决方案
Hexo在使用MathJax渲染公式时,与默认Markdown解析引擎marked存在冲突,导致公式中的下划线无法正确显示。本文记录了解决方案,包括修改marked源码、更换引擎及安装Pandoc,最终成功实现公式的正确渲染,并提供详细操作步骤和经验分享。